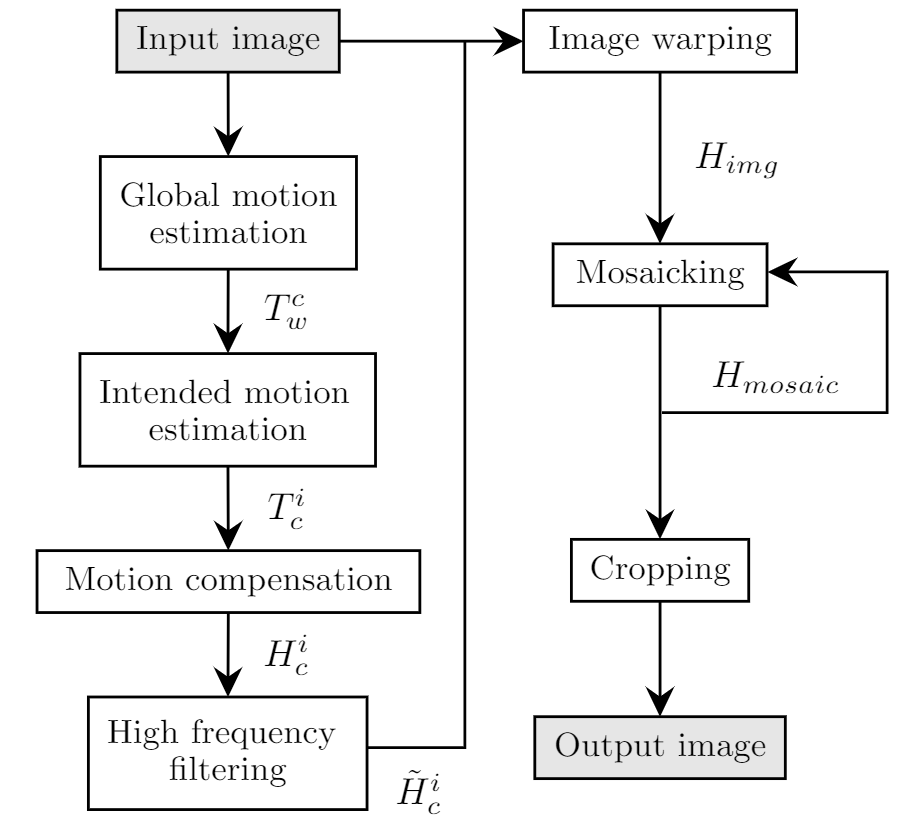
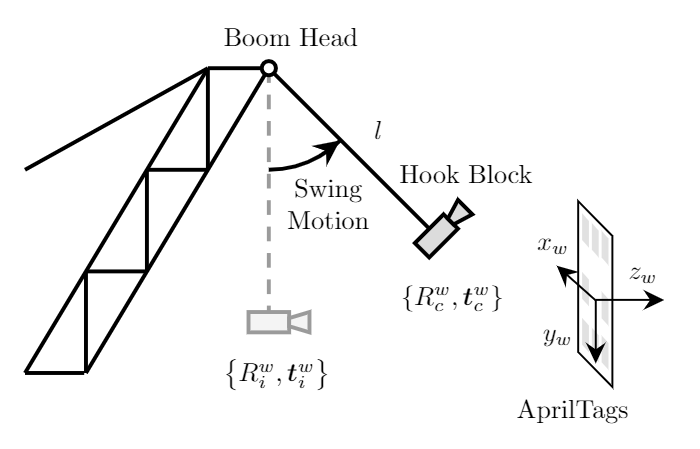
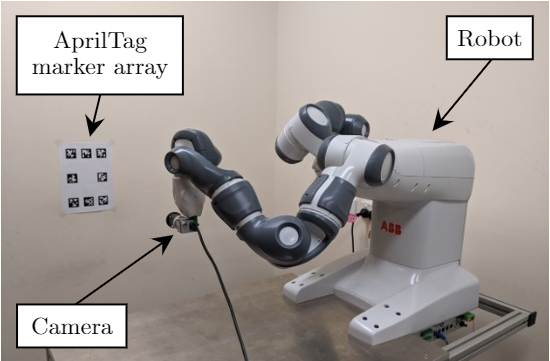
Tower crane operators often have limited visibility during lifting operations in the construction of high-rise buildings. Providing the operator with visual feedback from the perspective of the payload has potential to reduce collisions. However, a camera feed from this perspective is susceptible to disorienting swinging motions. This project presents an algorithm to digitally stabilize this low-frequency, high-amplitude swinging motion. A stabilized virtual camera feed is created to give the operator an intuitive perspective. The Euclidean transform between the actual and virtual cameras is related to an image transform. This is then used to warp the image to achieve the desired stabilization effect.Block diagram of the video stabilization algorithm.Experimental validation with a robotic arm to simulate the crane dynamics demonstrates the effectiveness of stabilization.Single-pendulum diagram of the simplified crane model. The camera is mounted where the crane payload would be located, and the AprilTags represent a desired position that we want the camera to track.Experimental setup. A robotic manipulator is used to simulate precomputed trajectories of a swinging payload mounted to a crane.